Part 3 - Implementation
3.1 Definition of implementation - two meanings
3.2 Causal opacity/transparency
3.3 Simple Biased Servomechanism
3.4 Complex Biased Servomechanism
3.5
3.6 ***UNDER CONSTRUCTION - THANKS FOR YOUR PATIENCE***
3.7
3.8
3.9
3.10
3.11
3.12 Use of Algebraic Normal Form to express syntagmatic and paradigmatic hierarchical dependency
3.13
3.14 New theory of cerebellar function based on its TDE role as a timing element
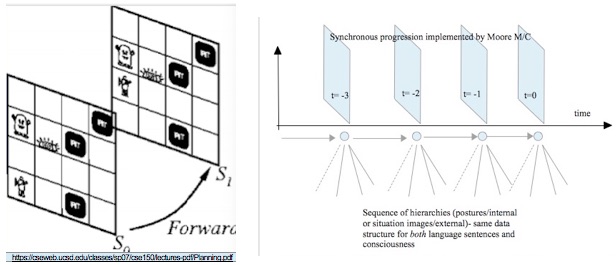
Figure 10 sequence of hierarchies forms the data structure for all behaviour including real-time narrative behaviour (consciousness)
Figure 11 Speaker-Listener pairing is a specialisation of leader-follower meta-mechanism ('mind' or 'software'), the pattern responsible for so-called 'mirror neuron' behaviour
Figure 12 The idea behind Read-only Memory (ROM) and memoization(sic) - the individualisation of instinct
Figure 13 Tsang's fractal architecture of human brain
Figure 14 Constituency and Dependency are not two competing views of grammar (syntax) but two complementary views of language, where Constituency = syntax/reproduction and (context) Dependency = semantics/representation
Figure 15 Neural ROM forms one of the key parts of the linguistic brain mechanism, namely its finite resource base map or 'alphabet'
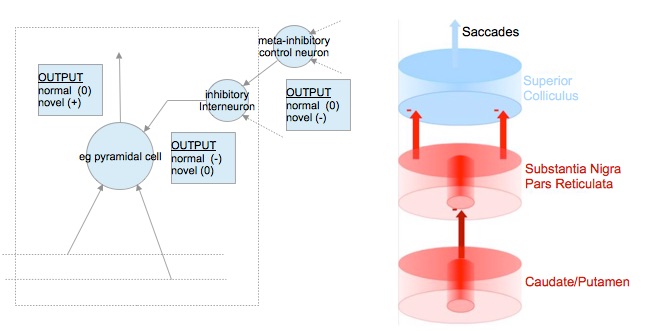
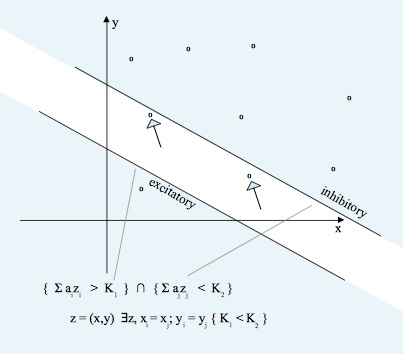
Figure 16 the combined excitatory and inhibitory influences on a simplified, stereotypical neuronal map form the neural basis of saccadic dynamics,
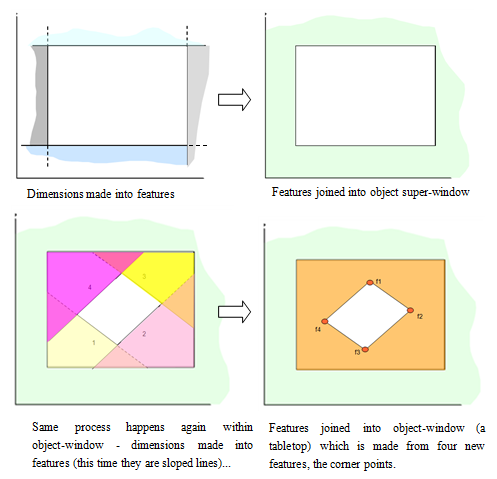
Figure 17 Use of a neural ROM design leads to functionality not unlike a dedicated graphics framework, namely sub-selection of sets of points within input sample windows
Figure 18 The TDE is both a finite state machine (FSM) and a modified homeostat
Figure 19 GOLEM duplex hierarchies implement descending constituency in output channel, and ascending dependency in input channel
GOLEM theory uses comparative (a.k.a. cybernetic, or asymmetric) logic
3.1 The term 'implementation' is potentially ambiguous, when used in the current context, but no matter- both of the two most common meanings are the subject matter of this, the third and final section. Firstly, this is about project implementation, that is, organising the process of building the brain and mind of a manufactured human, homo robotensis. The second interpretation is that of the cyber/neural substrate, the lowest level of the Marr trierarchy (three level hierarchy). The biological implausibility of synapse-based neuroadaptation is the major research finding that must be incorporated into the final design. How much of existing digital computer theory and practice can be recycled without sacrificing the bioplausibility of the TDE/GOLEM theory (TGT)? Clearly, a satisfactory answer to this question may save any 'serious' (ie serious about strong-AI[16] ) implementation team a great deal of time and money.
3.2 The most important property of any document or diagram that purports to be a 'blueprint' is causal transparency. In other words, the system architect/s and builder/s should be able to understand how the system functions, by following the chain of cause and effect through the blueprint's components.
How a two-component, hierarchical 'emotion' vector based on the spatiotemporal 'heterodyne' cybernetic circuit (see Figure 19), vertically integrates all three TDE levels to achieve statically and dynamically balanced AUTONOMOUS command and control of all biological organisms from the most simple multi-cell animals right up to and including human beings.
3.1.2.1 Global TDE (TDE-R) conforms to Tulving's (recursive) model
knowledge architecture --> declarative + procedural
declarative --> episodic + semantic (note: episodic == narrative)
3.1.2.2 Global TDE (TDE-R) consists of 1 self, 4 minds, and 16 brains (see Figure 1), where each brain governs its own body motion model, each mind governs a behaviour model and the self governs an individual's 'viewpoint' (this may not be the best word for what is a complex, nuanced concept). Since each behaviour is defined as that learned sequence of postures which end in a targeted situation image, ie a goal-defined situation or world state, being also defined as a 'motive'. If each 'viewpoint' is the set of all behaviours in the individual's repertoire, then the 'viewpoint' is also equivalent to the set of all motives. But motives are defined by the set of acceptable target situations (terminal process conditions) that satisfy the motive's goal state. Hence the set of all motives corresponds 'geometrically' to a view of all the motives, collectively perceived as an individually adapted group, hence the use of the rather unscientific term 'viewpoint'.
3.1.2.3 Just to confuse the reader even more, while entities at behaviour level 2 are (not unexpectedly) subjective, at the 'self' level, entities correspond to an 'objective' perspective, ie where every subject is treated equivalently. For example, when we speak, both Broca's area and Wernicke's area (usually both in left cerebral hemi, or LCH) are activated, such that while Broca's processes syntax, Wernicke's area processes semantics concurrently (parallel, counterflow/duplex IP model). BUT precisely the same thing happens when we listen to someone else speak as when we speak. Both our own (first person voice) subject, and the other's (second person voice) subject are modelled equivalently, a situation in humans that is entirely analogous to the 'mirror neurons' in macaques and other primates. Attempts to find mirror neurons in humans have been less than successful, a finding at odds with some of the claims made by the proponents of 'body language' [17].
3.1.2.4 Note that a goal state is the inner satisfaction measure. Each GS is matched by a satisficing set of target configurations (TC). There is a many to one relation between targets (TC's) and goals (GS's), reminiscent of the way that several desires (targets) can satisfy the same need (goal). There is a one-to-one correspondence between cybernetic goals and the differential state semantics in the corresponding bioplausible differential state machine, or DSM, which is the cybernetic equivalent to the computationally canonical finite state machine, or FSM. The DSM is a kind of hybrid automaton[20].
3.1.2.4 At each of the three TDE levels, the cybernetic pattern is the same, corresponding to a predictor-corrector mechanism, which is a phase-balanced servomechanism in which the 'lead' of the feedforward command phase largely cancels the 'lag' of the feedback control phase. Phenomenologically, the feedforward phase corresponds to the volitional component of the overall affective (emotion) vector, while the feedback phase corresponds to the expectational component of the emotion (qualia) vector. The use of a cybermaton as the cognitive engine is a decision with serious implications. It raises the question of whether every cybermaton has a kind of inbuilt phenomenology, even the lowly domestic thermostat (as suggested by David Chalmers). You (obviously) can't ask a thermostat a question, like- "Hey what is subjectivity/consciousness like for you?", but this will be, in principle, possible for a three-level TDE.
3.1.3.1 The main GOLEM/TDE design focus is on autonomy. When this machine is 'built', it will also need to be 'grown', at least for the first few times, using progressive exposure to developmental situations ie exposed to exemplar situations as a maternal-role parent would do to its child. Perhaps at a later stage, some short cut to real-time on-line exposure can be found. According to TGT, the sleep mechanism is precisely that - a way of exposing the low-level association memory to relevant semantics (hierarchical contexts) in the off-line mode. This mechanism is less physically dangerous than real on-line association learning[17] mode. Unlike a procedural automaton, whose mode of action is limited to an unconscious one, a TDE/GOLEM is a declarative cybermaton, which uses global system goal-target differentials to select which means to use to satisfy current ends at each processing sub-level. Therefore, in a concrete way, it will have its own 'thoughts'. This will be true for each of the four TDE(2) 'mind' levels and probably for the single TDE(3) 'self' level. Therefore the final 'envelope' of phenomenal consciousness will not be easily predictable without constructing a prototype.
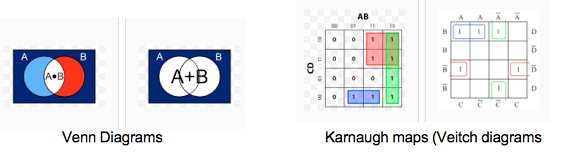
3.1.3.2 In TGT, logic and cybernetics are related. The neural networks in the TDE are built according to Occam's Razor- they represent the simplest possible mechanism that can compute- the state loop. Each neural loop is latchable into 'up' and 'down' states via pairs of self-inhibiting metaneurons. The use of modifiable synaptic functions is not preferred according to Occam, because it is a more complex way of achieving the same design goal. In all servomechanisms, from simple one-level predictor-corrector controllers to complex biological intelligences (BI's), it is the datums (level goal states) that are open to deliberate variation. This description is equivalent to saying that BI's employ a form of declarative programming. This cybernetic view of datums[5] is normally unconnected, or distantly related to the conventional treatment of logic in the theory of machines, but in GOLEM, the two views are one and the same. In zeroth order classical logic (propositional logic), a logical variable x (lower case) is TRUE at a propositional level if the measured value of the variable EQUALS (within an error margin) the expected value. In zeroth order cybernetic logic, the same principle applies, with one crucial difference- the logic test is TRUE at a propositional level if the measured value of the variable THRESHOLDS (is equal to, or greater than) the expected value. In first order classical logic (predicate absolute logic), the variation of logical variables can itself be made a variable and compared to a datum. Then the problem is not whether the variable's value does or does not equal a datum (ie whether its LOGICAL STATE is 1 /True or 0/False), but whether the variable's rate of change of value does or does not exceed a datum. In the first case, where the value is compared, the STATE is relevant, however, in the second case, where the variation is compared, the RATE is relevant. In first order cybernetic logic, (predicate relative logic) similar principles apply- the logic test is TRUE at a predicate level if the rate of change (variation) of the variable THRESHOLDS (is equal to, or greater than) the expected variation. In the case of predicate, or relative logic values, a superthreshold dynamic rate or relative value change is denoted X (RELEVANT or present/extant from modelling computation) while a sub-threshold rate of change is denoted X' (IRRELEVANT or absent/extinct from modelling computation) [6]. Nothing reveals the differences between propositional (zero order) and predicate (first order) logic than their diagrammatic form. The Venn Diagram (VD) is the diagram used for propositional logic while the Karnaugh Map is the diagram used for predicate logic, whether the logic is absolute/classical or relative/cybernetic. However, most other computations are Boolean, and are thus identical for both zero and first order logic, eg one can still use de Morgan's Law, K-map simplification, etc.
3.1.3.3 Another viewpoint (which possesses significant similarities to that in 3.1.3.2 above) is that human language is a Piercean, semantic code, NOT a Saussurian, syntactic one. Semantic codes rely solely on hierarchies and manipulations of hierarchies for data storage and processing respectively. Although this may seem like I am jumping on the 'semantic web' bandwagon, this is a false impression. In fact, I am introducing something not entirely new in the AI context, the idea of 'semantic biocomputation', and by extension, 'semantic programming'. Hierarchical programming is thematically adjacent to object-oriented programming (isn't object inheritance just another name for hierarchy?).
3.1.4 If the first order logic variable, say X (upper case) is not relevant, its variations in value between T and F can be ignored, and it is denoted by ~X usually written with the bar over the top, meaning 'X is being ignored due to its irrelevance. How do we know to ignore X? We use a Karnaugh map, which is to predicate logic what Venn diagrams are to propositional logic. The Karnaugh map is a graphical method of depicting predicate or 'free' variables. K-maps have a built-in method of eliminating irrelevant combinations of variables, called 'DONT CARES'. The K-map is a method of plotting predicate logic combinations, comparable to the Venn diagram, which plots propositional logic combinations (see figure 20). Many computer programs use both types of logic, although K-maps were developed to fulfil a specialist purpose, namely circuit length and component countminimisation in hardware design.
3.1.5 Propositional logic is useful in so-called 'forward chaining' type reasoning (eg syllogisms like modus ponens), which is equivalent to putting numbers in an algebraic equation and calculating the output number. However, so-called 'free variables' are possible with first order logic, and with them comes the possibility of 'backward chaining' - this is analogous to solving for the free variable X from the complete algebraic equation. The specialist language Prolog has backward chaining built into its interpreter, so you write lines of program code in 'Horn clauses' which the interpreter solves 'on the fly'. The importance of these observations is that 'natural language' sentences resemble predicate calculus statements in most key respects. GOLEM takes a slightly different approach to natural language - it implements semantics in terms of context dependency in the sensor-side channel, so that the basic form of the recursion which generates the representation (perceptual channel) hierarchy is <subject><predicate>, where <predicate> is in most cases almost the same as <verb phrase> in constituency grammars.
3.2.1 As well as many similarities between computer designs and brains, there are many dissimilarities. According to Ada Lovelace, Lord Byron's 'partner', and much touted as the 'first computer programmer'(sic), no matter how clever our AI machines are, they rely on humans for their design and construction. Perhaps we have no right saying they are intelligent in an autonomous sense, because no matter how autonomously intelligent, and perhaps even conscious, one individual design may become, as a class of machines, they can hardly be called autonomous, but properly belong in the box of human aids (tools), together with hedge clippers, spanners and ocean tankers. Or so goes the classic 'Lovelace objection to AI', one of several such 'classic' skepticisms. Note, however, the views of many futurists, that we may already be living in a post-biological universe [8].
3.2.2 The 'standard' serial computer with multitasking operating system is called a SIMD architecture, meaning Single Instruction Multiple Data. The really interesting thing is that the design has changed (I had to fight the urge to use the word 'evolved') from its initial form in the 1930's and 1940's as a super-calculator to the current form we have today in which every aspect of the mechanism is 'soft' except for the bare memory spaces. There really is no 'hardware' in the original sense, but downloadable 'firmware' or ROMbios which implements a relatively tiny instruction set and address space in very, very fast but power-hungry 'registers'. This idea in turn has been gradually discarded in favor of the low 'resting' power mobile device chips which are multi-core and thus no longer strictly SIMD. However, I will in all likelihood be implementing GOLEM/TDR in a very ordinary desktop computer of 2007-2012 vintage running MacOSX or Windows 7/8/10 operating systems, not just to reduce costs, but to attempt to demonstrate how easily a common-or-garden PC can be converted into a human-like being.
Hierarchical File System
3.3 The key point to notice is that this type of machine relies on a hierarchical filing system for everything it does, exactly like GOLEM! The similarity between this HFS and GOLEM's neural 'setwork' ROM architecture is clearly one of the major factors affecting the choice of a digital computer as a candidate for GOLEM/TDER prototype implementation. Since we have defined meaning as context, the meaning of any data structure derives directly from its place within a hierarchy. Indeed, a hierarchy is the data structure which has been created precisely with this definition in mind, and which best executes that function. Hierarchies represent the implementation of nested (fractal) context. Indeed, it is because of the nested context relationships in trierarchies (3-level hierarchies) that language works at all! Consider a typical word. The neural pattern matching that word is held in context within the right cerebral hemisphere, together with all other patterns the person has been exposed to since infancy. This is what it means when Tulving says that the RCH is the repository of 'semantic knowledge' (see figure 3.0 below). The diagram depicts a series of animation 'snapshots', above a depiction of a data structure encoding that animation. Each 'slice' of the animation is a 'situation image' (see www.tde-r.webs.com) composed of parts. The parts and the whole SI have a hierarchical relationship as follows- the parts are syntactic 'constituents' of the whole, whole top-level meaning is derived from its diachronic context, that is, its place in the animation sequence. However, the meaning of each part is also partly derived from its place in the synchronic hierarchy in each animation frame. Clearly, in a highly interconnected network, each of its (potentially multiple) spanning trees is a potential hierarchical context, depending on the (deterministic) manner in which that tree was built during learning epochs in infancy.
GOLEM is implemented using a concept I call 'setworks'. These are networks of sets, such as the nodes on GOLEM's duplex information tree[2].
THE NATURE OF INTELLIGENCE
3.4 How many ways can a creature be/become intelligent? These findings seem to suggest that a GOLEM pattern must exist in some way, shape or form at the core of every instance of intelligent behaviour. For example, those involved in SETI (Search for Extra-Terrestrial Intelligence) should look for something that could function as a fractal GOLEM pattern -remember, fractalism is at least as important as GOLEM bicanalisation, since fractalism is alsonecessary for life (cellular-level social interdependency).
So what exactly is a GOLEM? The basic unit is a code-data pattern that extends from behaviourist hardware (responses, stimuli) at the 'lowest' level to existentialist software (subject/self, object/body) at the 'highest'.
What is the difference between the GOLEM pattern and the TDE pattern? In the most simple answer, the GOLEM is the hardware and the TDE is the software and user interface (self). Every instance of a TDE pattern contains the GOLEM I/O duplex information channel pairing - that's what makes it work- but the converse is not true. The GOLEM is a more basic thing than the TDE. The TDE is a tetrafoil (four fold) fractal, which gives the topmost, motor region of the GOLEM (the part with the self-defining grouping of subjective agency-generating goals) a higher level of importance. In the TDE, this region, called the L-lobe, is at the centre of the three remaining 'petals' (see figure 1).
HOW THE GOLEM ADDRESSES THE FRAME PROBLEM
The history of the FRAME PROBLEM and AI
3.5 The heart of my biocomputer is a computational unit called the TDE. Figure 1 demonstrates that there are 16 TDE's at level 1, 4 TDE's at level 2 and only one (1) TDE at level 3, because there can only be one 'self' entity for which the experiences coded for by narratives at level 3 pertain. Each level 1 TDE generates posture map increments across the 'crown' of its P-lobe, thereby 'walking' across the posture map from initial posture to final (target) posture. The T-lobe is a spatial ROM, a Moore machine which generates global increments in configuration (eg posture at level 1) in response to a common 'clock' pulse or inhibitory ganged T-value sampling ramp (saccade). The F-lobe is a Mealy machine, consisting of many individual, asynchronous State Transition Machine (STM) graph edges which represent situation specific input/output symbol transfer which often turn out to be (encryption/decoding) functions, eg in a compiler.
This is the way I described it in a previous website.."The spatial field data at time t is input to the TDE, which contains the initial position of the mechanism, stored as a ROM, a Moore Machine. This real position data sub-selects a part or whole of the mechanism's structural configuration (its posture). This sub-selected part is then used as input to the F stage, which is another ROM, this time a Mealy Machine. The F lobe has two outputs- the next step position of the mechanism's static structure, that is, the next finite state of the Moore state-machine, and the set of linguistic output symbols, which, depending on the fractal scale, can be as low-level as the next pair of (position, angle) values for a robotic end gripper, or, equivalently, can be as high-level as the next word of the sentence currently being spoken".
3.6.1 The TDE is an essential component of the language-machine, because it converts an internal state-context (a meaning, a semantic dependent) into an external space-construct (a message, a syntactic constituent), and vice versa. The TDE is inherently Frame Problem-friendly, that is, it has two important FP-wise features. The first one is the T lobe. This is a STATIC FSM (finite state machine). That is, it tracks the entire computational state-vector, which is a HSM or hierarchical state machine, possessing states-nested within-states etc. There is enough material about HSM's on the internet, so that the dedicated reader will be able to understand the topic. Secondly, the F-lobe is a DYNAMIC FSM. This means that it tracks, for example, structures that are moving at constant velocity, or processes that are morphing at a constant rate. The reader should recognize this feature as an implementation of Newton III. If something isn't moving, it stays still, but if something is moving at constant velocity, it also stays moving at constant velocity. BOTH static and constant velocity motion are instances of the rule V = constant. To change an object's velocity, force must be applied over a period of time, and that means energy transfer, either input, or output, in the case of braking (velocity reduction). Most incremental (reflex) body motion controlled by the brain is saccadic, that is, it employs a predictor-corrector feedforward/feedback cybernetic strategy. This ubiquitous algorithm appears in nature and in technology in many different forms under many different names, but the underlying idea is identical. If you program the brain to sample the input (percept) window, you must think about the time delay involved in sensor input, that is, the bottom-up (ascending) hierarchical neural transmission latency.
3.6.2 By the time the data has travelled the 20-50 milliseconds from skin to sensory cortex, the organism has moved ahead slightly, so the data is 'old'. The Predictor-corrector algorithm replaces the data from the current nth sampling interval (or time 'window') with data from the next (n +1)th sampling window , a strategy made possible by the knowledge that, at the millisecond scale, things rarely change that much. To summarise, if you use the TDE in its most basic, robotic mode, to track the constant velocity motion of a single point mass in zero G, the T lobe contains the position of the structural part of the mechanism (which is null, since a moving particle is 100% process), and the F-lobe contains the change in position, or delta (which equals its constant velocity). Every system, physical or virtual, contains manifest and latent behaviour instructions. For example, simple particles have kinetic and potential energy. In a G-field, they keep falling until they reach a gravitational minimum. Even at the much more abstract, linguistic, level, a system behaves according to its currently executing code, until a change in the code pointer context causes a new mode of action. The point is, the TDE model covers both low and high level system activity. The FRAME PROBLEM and its relationship to PREDICATE LOGIC and PROGRAM COMPILATION Compilation is an inevitable part of the use of HLL's (high level languages) in modern computation. HLL's allow programmers to be much more productive by taking care of all the low-level logical 'housekeeping' . For example, in FORTRAN (FORmula TRANslator), engineers could efficiently translate engineering formulae into efficient code. With the help of clever compiler writers, the engineer-programmer was able to be brilliantly bilingual, eventually rising to very lofty heights indeed, namely the Apollo Moon Landing missions. We don't think of compilers as devices to counter the frame problem, but they are. The Higher the level of language used to analyse a given problem domain, and/or synthesize a given programmed solution for that problem domain, the less 'book-keeping' the human programmer must do to keep track of a complex system's content (configuration) and context (the changes made to its environment).
3.6.3 Now we jump conceptual boundaries, from computers to human brains. We see a similar process occuring, in the use of Predicate (First Order) Logic descriptions to update global database knowledge states. FOL statements allow rules to be written about entire sets of logical entities, without their explicit specification. In FOL, you can write ("while changing X, nothing else unconnected to X changes"). FOL makes 'for each' and 'for all' type functions possible, something that languages which use propositional (zeroth order) logic cannot express. Indeed, that is why we have such a highly developed Right Cerebral Hemisphere (RCH). While the LCH manages the contemporaneous aspects of language (its syntax) and as well as the narrative nature of consciousness (see Dennett 1981), the RCH acts like a semantic database, storing the idea of self-in-world state ("states of affairs") in its most general, multiple order of magnitude, or FRACTAL, form. It is the RCH which is the T-lobe of the global TDE, or TDE-R). If you have followed the argument so far, it is apparent that the frame problem is an issue for ALL computing systems of ALL kinds, EVERYWHERE. Compilers and HLL's were an early attempt to minimise FP issues for everyday computers. The higher the level of abstraction used to encode actions, the better a job the system does of tracking and encapsulating the unintended consequences of those actions. By converting the human biocomputer into a fractal (hierarchical) state machine, the TDE/GOLEM (or GOLEMMA as I have named the whole design)tracks the static and dynamic aspects of state (or 'state and rate') more completely than currently conceived alternatives. The 'down' side of using high level declarative concepts like 'episodic' and 'semantic' knowledge is that an off-line period of error recording consolidation (sleep) is mandatory, if one wishes to avoid the incremental growth of confusion, madness and eventually, death. Computers are also subject to the same rules. They use 'compilation' of HLL source files into low-level language assembler files. This is performed each time a program is modified even slightly. Compilers are executed continuously of course, during the software's creation period.
The problem of linguistic computation
3.7.1 The premise and the promise of linguistic computation goes a bit like this- language is a computational system which uses simplicity to yield complexity. That is, languages employ finite resources (a fixed, small, number of alphabet symbols, and a fixed but expandable set of meaning bearers or 'words') to generate infinite variety. The most common everyday example is this- many of the sentences you say each day are being spoken by you for the first time. Of course, the most frequently spoken, shorter sentences are not new, but that is merely Zipf's Law in operation. From a purely combinatoric aspect, the number of possible multiple word sentences is astronomical, even when you eliminate the ones which are patently ungrammatical. What many people fail to realise, however, is that this combinatoric profligacy requires an equal degree of computational (ie algorithmic) performance, which is why all real languages rely heavily on maps which are also known as ROM's, look-up tables, call them what you will. The basic idea, which is a simple one, is shown in figure 8. There are two ways to select data (eg '5') from a range of values (the integers '3'-'6' are used in the diagram)- (a) place them in a rewriteable memory each time you need to use them, or (b) store each value in its own memory cell, with its own known, constant address. Rather than having to deal with data of a certain type at a variable address, maps allow you to achieve the same goals with an untyped programming concept called pointers. Programmers have a choice in handling function parameters between either passing them 'by value' (where the data is copied into a temporary buffer)or ' by reference' (where the data is accessed by following a pointer to a table location, or place on a map). When using a pointer, the only extra data needed is the 'offset' or 'width' of the actual data objects being accessed.
3.7.2 More than any other computer science concept, pointers implement the abstract concepts of deixis and anaphor, referring to 'thing' and 'number' (ie multiplicity or plurality). The latter technique is called a ROM or Read Only Memory, and is an order of magnitude more efficient than the former (RWM or Read Write Memory). Note that non-ROM memory is often mistakenly called RAM, which actually refers to a subset of RWM which is randomly addressable . ROM's are efficient for the reason that searching for data content is not needed, once the initial data address is known. Indeed, the address of the data is defined as its (contextual) semantics (a formal type of meaning definition- see figure 7), and the data found at that address determines its (constitutive) syntax. The term 'ROM' is well known from disposable digital computer discs which are called CD-ROMs, because they are a compact disc upon which the desired data is written once only, then read as many times as required. The term 'memoization' (NOT 'memorization') is also used to describe this general approach. However the technique is not without issues- memoized memory designs balance the benefit of greater performance with the cost of substantially greater memory capacity needed per unit data stored. The cerebral cortex is, GOLEM theory claims, just such a map. Indeed, its highly convoluted 3D shape is nature's attempt to fit a large number of ROM cells into a size-constrained cerebral vault. GOLEM theory justifies this claim by means of the pose cell sub-theory, which explains why most neural circuitry is Read-Only data storage type. According to this sub-theory, infant animals are born with far too many neurons. During and after pregnancy , random movements of the limbs and random excitations of the glands, or 'effector babbling', cause sacrificial attrition of two subsectors of the neuronal population.
3.7.3 Note that muscles and glands are viewed as variations upon the same basic effector plan, being anatomical and physiological effectors (feedforward agents). During such effector 'babbling', neurons which (a) never fire, or (b) fire constantly are removed from active duty, leaving only those neurons which fire sometimes. Clearly, it is only those 'middle-of-the-road' neurons which show variations in their output during babbling (during which the full range of effector variation is explored) that can be used to encode aspects of sensorimotor functionality. The most obvious, simple scheme (Occam's Razor) which can cause this to occur is if the synaptic conductances of all the neurons are deliberately allowed to vary according to a normal or Gaussian error distribution over some finite range (eg by in utero expression of the appropriate neural tube growth factors which cause a greater or lesser number of receptors to become embedded in dendritic membranes). There is at least one well known mechanism for such conductance-based neural attrition, and that is excitotoxicity. As far as the other group, the neurons which never fire, are concerned, they may well die via some other means, or be retained for future neural 'plasticity' options (though it is not synaptic plasticity in the normal sense which this term describes, but neural rewiring, or neoconnectivity) The end result of this process is a population of neurons, each one firing under one unique set of circumstances.
3.7.4 Lets shrink the real multidimensional space of this neural map down into two map dimensions, x and y. Consider the shared 'normalised' combination of inputs {0 < x < 1.0, 0 < y < 1.0} to each neuron with synaptic 'vector' [a, b] where a and b are the conductances of the two dendritic processes, each one corresponding to the axonal inputs {x, y} - see figure 11. How do we compute the application of the shared input signals to the neural synaptic vector, eg as a result of a saccade, or window scanning 'sweep' oscillation? The 'natural' arrangement, where the 'x' input component is applied to the 'a' synapse component and the 'y' input component to the 'b' synapse component results in the simplest possible computation, the inner product of the variable input vector {x, y} and the fixed synapse vector [a, b]. The inner product of two vectors is itself a scalar. When unit vectors are used, the inner (or 'dot') product equals the cosine of the angle between the graphical form of the vectors- indeed, that is one of the two major reasons why simple 2D vectors have been chosen. Higher dimensional vectors (such as words!) have no easy graphical portrayal, so we may employ specialised mathematical markings and other forms of nomenclature to create unambiguous forms of expression. The other reason to break higher dimensional arguments into groups of two dimensions arises from the natural commutativity of relative rotations (eg a pan, followed by a relative tilt, which is followed by a relative roll). When relative rotations are summed, the result is always the same, no matter how the summations are interleaved, as occurs for example in a robot which relies upon a multi-tasking computer operating system to compute end-effector trajectories. This ability is contrasted with absolute rotations, which are encoded as matrices (tensors) in which successive partial additions do not commute in the general case . The reader can convince themselves of this by spatially rotating a book or biscuit tin with their hands. Commutativity is violated because if the book or tin is rotated first around one axis, then around another one at right angles to the first, it ends up in different orientations, depending on which two of the three available axes is chosen. That is, the result of adding absolute 3D angles, also known as extrinsic Euler angles, depends on the order of addition, while adding relative 3D angles, also known as intrinsic Euler angles, is independent of the method of addition, that is, intrinsic angles, in which the coordinate axes are rotated during each addition, commute, but extrinsic ones do not.
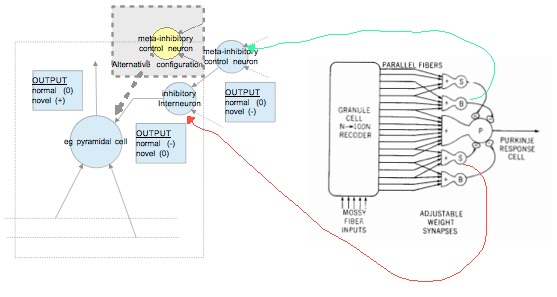
3.7.5 GOLEM's top-down effector hierarchy and bottom-up affector hierarchy act upon the same populations of neurons via excitatory and inhibitory synapses respectively. Figure 9 shows the so-called dopamine cascade (green arrows), which are part of the inhibitory hierarchy. There is a matching duplex excitatory hierarchy (green arrows). When the influence of the inhibitory synapses exceeds the influence of the excitatory synapses, the number of available neurons within each selected set or collection is reduced. This is a generalisation of the well-known oppositional behaviour of the cerebellum and basal ganglia. While the cerebellum output acts to add effector actions on the computational 'queue', the basal ganglia output tends to eliminate some of those queued actions, ie it selects which actions are to be made. This highlights one of the many advantages of the combined electrical-chemical transmission system used by almost all animal neuronal circuitry- if a neurotransmitter type is shared amongst a population of anatomically proximal neurons, then all of the neurons can be affected in a similar manner, thus permitting a 'narrowcast' divergent transmission mode. Ultimately, the purpose of neurons is to code for real-world variable values, just as digital memory contents do in computers. Figures 11 and 12 depict the way neurons within a ROM (read-only memory or map) encode real-world values. In figure 11, the basic mechanics of the McCulloch-Pitt's neuron is shown. Note the use of ganged (ie shared amongst all the neurons in a layer) inhibitory axons to act as a 'sliding sampling window' which samples a new set of inputs (x,y) each time the ganged T-value rises and falls. Remember these neurons are part of a map, and their synaptic vectors are also fixed- there is (obviously) no need for a gradient descent error reduction algorithm like backpropagation, because there is no synaptic solution value to be computed! Traditional ANN methods may work well in many engineering contexts, but they have no place in BI. In figure 12, each neuron in a gang is used to construct a feature hierarchy from data sample windows (hence represent real things and relationships). These can be subtracted and added to perform logical computations upon the sub-hierarchies.
linguistic cognition not cognitive linguistics
3.8.1 Even those people who do not study linguistics know that language is composed of two parts, semantics and syntax. Clearly there is more to it than that. For one thing, we must find a way of including current theories of generative grammar in our framework, eg Chomsky's minimalist program. GOLEM theory provides one way of dividing up the topics- the top-down motor channel does the syntax using recursive 'production' rules, thereby creating a taxonomy (the technical name for a label-based hierarchy), while the bottom-up sensor channel does the semantics, by classifying each feature as part of an ontology (the technical name for a feature-based hierarchy). The reproduction-based motor-channel does the 'forward' engineering, by encapsulating meaning within a grammatically acceptable message, while the representation-based sensor-channel does the 'reverse' engineering, by doing precisely the reverse operation, that is, extracting meaning from messages. The GOLEM is also equipped with a lexicon, a list of words and their nominal meanings, which the organism usually learns implicitly from a parent or peer, or is explicitly taught (eg via a dictionary) by a professional teacher or other style of educator. From the nominal meanings of the words in each sentence, plus the constituent (ie phrase and clause) structure of the sentence, the case of the word is determined, hence the listener knows how to narrow down the word's broad nominal meaning, to give it its final semantic interpretation. There is much duplex feedback between sensor-channel and motor-channel before a final solution is found for each word (see figure 7).
3.8.2 It is from the higher order fractal arrangement of neural interconnections called TDE-R (Tricyclic Differential Engine- Recursive) that the remainder of the solution can be extracted. The TDE-R has three levels (see figure 1) which code for (1) gesture (2) behaviour (3) experience. Each level is represented by different size circles in figure 1, as indicated. The acquisition of the nominal semantics of a word occurs while the teacher (eg parent) and pupil (eg the infant or child) are both embedded within the same experience, where the word is defined within figure 1 as comparative or relative behaviour. Each experience is defined by a viewpoint, and the effective teaching of nominal semantics depends on the teacher and pupil temporarily sharing the same epistemological viewpoint. Consider the parent teaching the infant what 'breakfast' means. Initially this would consist of the parent saying the word 'breakfast' while placing the food in front of the baby. This could not be confused with 'lunch' or 'dinner' because the infant's brain would compute (deterministically) the TOTAL hierarchical (ie context dependent) embedding and thus detect that the time of day (diurnal phase) was different, hence the classical conditioning associativity mechanism would still work correctly.
3.8.3 However, learning about the nominal meaning (word as a sensory representation) of a word is not the whole story. The child must also learn how to use the word syntactically (word as a motor reproduction), that is, learn how to place it within a grammatical (linguistically shared) framework. This kind of learning belongs not to level 3, as in the situation above, but to level 2. That is, the infant is not learning how to associate a special sound with a situation (experience), it is learning how to use the sound with other similar sounds in a kind of game, ie associate the sound with a perception (behaviour). Of course, the infant must have learned to form words (level 1) before learning their nominal meanings (contextual embeddings), otherwise the 'language game' would be neither meaningful or fun. In terms of reverse engineering , the sequence is going from level 3 to level 2 (ie going from an outer, enclosing context to a more inner one). Just as the infant must learn how to form symbols (co-articulate phonemes into words) before acquiring their semantics (deterministic exposure to the sonic complexes in their correct embedding context), so the infant must also have learned semantics of all words used, before learning their syntax (grammatical construction rules). The words are learned using TDER level1, the sentences using TDER level 2 and the paragraphs using TDER level 3[3].
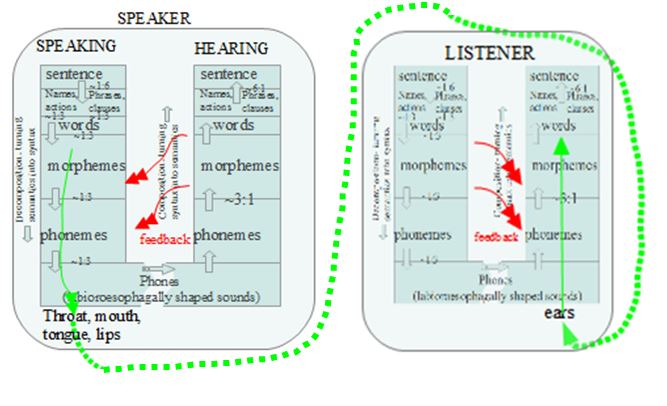
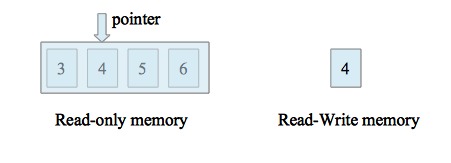
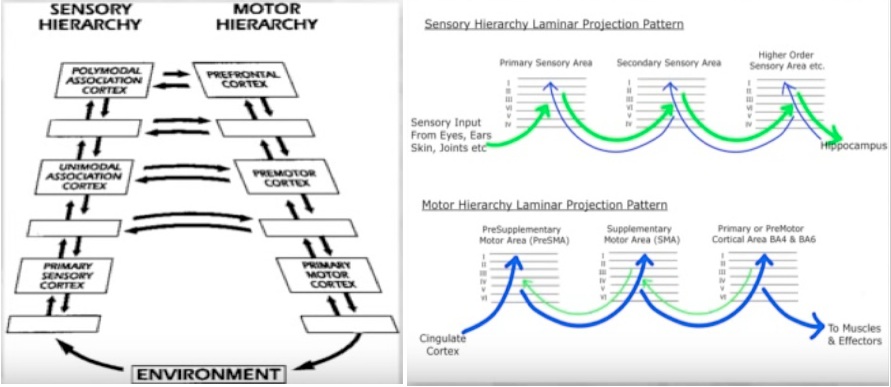
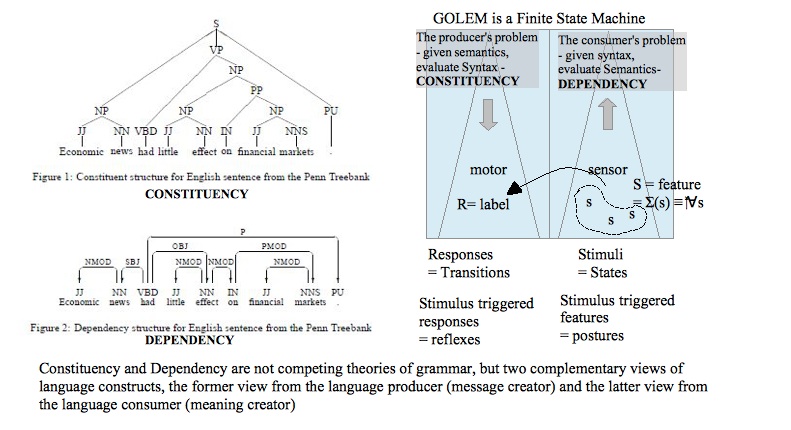
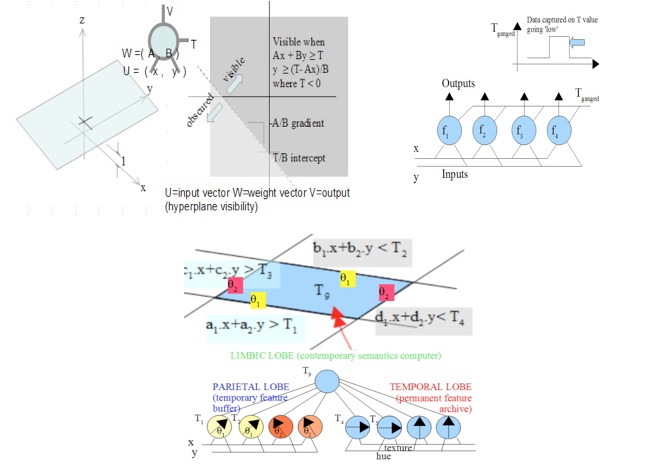
Figure 16 depicts the combined excitatory and inhibitory influences on a simplified, stereotypical neuronal map. Many neurons exhibit saccadic dynamics, the brain's solution to accumulated signal transmission delays. For these neurons, the ganged, variable thresholds K1 and K2 are both 'swept' in an upwards direction, ie caused to follow each other as they 'sweep' across the neuronal map, thereby implementing saccadic (predictor-corrector) sampling and control strategy.
Predictor-Corrector control IS saccades
3.9.1 Predictor-Corrector control is a technical specification for saccadic motion of distal scanning articulators (eg eyeballs, inner-ear tuning muscles, all excitatory-inhibitory neurons) . . . .
Common Coding IS servo-mechanism and PCT
3.9.2 Common coding is a way of expressing motor-side and sensor-side codes using the same (ie a 'common') measure or metric. Usually, the motion of a body of an agent organism is expressed in terms of the changes in percept and position caused by the motion within the sensor coordinate frame (input data window) . Colloquially, if a robot uses its motors to rotate clockwise (looking down from above), the image of the world 'seen' by the robot's camera eye moves to the left, that is, anti-clockwise. The global rotation of the robot is simply the negative of the local rotation. More complex local-to-global (and vice versa) transformations are usually involved than this most simple of examples, but the core principle (common coding) is exactly the same.
3.9.3 It has been stated that, "the common coding theory (CCT) accounts for … perception-action linkages by placing perception, motor imagery and action in a common representational domain"[14]. CCT is more than 'just a theory' (using the word 'theory' in a non-scientific manner). In fact, there is direct neurophysiological evidence for CCT, in the form of so-called 'mirror neurons' in macaque monkeys. Macaques are highly intelligent, social, tool-using primates who possess virtually identical neural circuitry to humans- (Rizzolato & Craighero 2004). The mental rotation experiments of Shepard & Metzler also constitute strong, though indirect, evidence for the existence and operation of similar, if not identical sensorimotor codes which govern both real-time (physical) and off-line (virtual) behaviour .
3.9.4 To understand the similarity of CCT to servo-mechanisms, we must detour briefly into the engineering history of cybernetics (using the word in its proper way, to describe the science and engineering of systems control). The basic idea is to analyse a simple amplifier (technically: feedforward effector), to determine how its design should be changed to provide more stable, predictable performance. Consider heating a room. The improvement referred to is specifically known as a thermostat. By generalising beyond the control of heat to the control of any engineering variable, we arrive at the 'homeostat' which, roughly translated, means 'same state'. Homeostats contain an internal datum (plural: data) with which to compare the input (the 'controlled') variable. If the input is less than the datum, the difference operation yields a positive number, and the effector (eg room heater, robot arm cylinder etc) is given an order to move forward, or heat the room. Strictly speaking, homeostats are asymmetrical. That is, to control the situation where the room temperature is greater than the datum (the difference operation yields a negative result) a heater is obviously useless. In this case, an opposing homeostat which commands a cooling device ('heat exchanger' or 'chiller') must be added. This is the way every action circuit in the body is constructed, with complementary positive and negative effector control systems, whose opposing actions (ideally) cancel to yield the desired value. For example, both human muscles and robot hydraulic cylinders both come in complementary flexor/ extensor pairs, eg biceps and triceps for the human upper arm.
3.9.5 What happens if the desired temperature (thermostat) or other engineering variable (homeostat) needs to vary sometimes? How can we retain the accuracy the homeostat possesses, an accuracy we customarily attribute to the internally maintained datum, but allow for slow changes in the variable when required? The solution is known as the servo-mechanism, and it involves nothing more complex than adjusting the datum value to the desired level. The 'servo' homeostatic circuit is exactly the same as the one in the 'vanilla' homeostat. Nothing has changed, so it should behave identically for each of the variable 'setpoints' chosen (setpoint is a more industrial-strength name, one which means exactly the same as 'datum'). How does this connect to common codes? Imagine using a 'servo' circuit to control a robot's movements. The servo wouldn't control the force signals at the neuromuscular junction directly- rather, it exerts control by regulating the effects of the force (ie the percentage change in displacement, or 'strain') at the muscle, at the alpha interneuron (in series) and for complementary (limiting) action, at the gamma stretch receptor (in parallel). In TGT this mechanism is known as the Cybernetic Servo Principle (or CSP - see sect. 3.14 below). William James, so-called father of modern psychology, used the term 'ideomotor principle' to refer to CSP.
Action simulation versus Cognitive Simulation
3.10 .1 Action simulation refers to the situation in which predictive or internal models used by an individual to monitor their own performance are also used as a way to simulate (predict) the observed actions of others. In the literature, this form of simulation is usually contrasted with cognitive simulation , the type which is implicated in the debate about theory of mind, that is, the mental state used when putting yourself 'in another person's shoes', if you will. GOLEM theory (now we are using the word in its correct, scientific manner) aligns these two concepts with unambiguous neuroanatomical correlates. The former type corresponds with reverse-engineering exercises normally undertaken at GOLEM level 2 in figure 1. GOLEMs can use level 2 to predict the motion of third parties. The latter type of reverse-engineering (cognitive simulation) corresponds to what people normally call 'empathy' or 'mind reading' , and involves the modelling of the current real-time cognition stream of the 'other self' as an identical copy of one's own at level 3 on figure 1. By using the term 'reverse-engineering', the intention is NOT meant to suggest something unusual or perverse (in the engineering sense). Rather, we humans use the predictive abilities of levels 2 and 3 constantly in reading and social communication. We could probably not understand language so easily (supposedly a level 3 matter, since that is the level we possess uniquely amongst other animals) without also invoking level 2 (ie physical motion of third parties) prediction. After all, it is the physical motion of the vocal or handwriting 'apparatus' which actually creates speech forms in all their diversity, and it isn't like 'nature' to ignore such a rich source of low level information. Indeed, because figure 1 is fractal, multiplelevel 2 predictions seem to be nested within each use of level 3 predictive ability.
Part 3 - Coding
3.11.1 Consider a room with a homeostat (eg a thermostat controlling a heater). There are two scenarios of interest. A person who is currently in the room can adjust the temperature to suit themselves, if the original setting is not comfortable. They do this not by adjusting the heater directly, but indirectly, by adjusting the setpoint value. This technique is called 'servomechanism' control, especially when the controlled system is a mechanical one. This mode is called 'tactical' because it corresponds to the commonplace definition of the term, real-time adjustments made using latest updated information. However, what happens when a heater policy must be set in advance-for example, setting a comfortable temperature during the day when people are at work, but saving fuel by setting a lower value at night when the room is unlikely to be used. This mode is called 'strategic', 'planned' or 'programmed'. In this case, the 'vanilla' homeostat is modifed by adding a feedforward iterator function (see figure 14), which allows the programmer to add a discrete number of datum (ie setpoint) offsets to the input value. These skew or bias the basic feedback behaviour toward a series of desired, sequentially accessed, datum points, called a 'scheme' or 'trajectory'.
3.11.2 Control engineers and system scientists (collectively: cyberneticians) spend a lifetime getting to know how to model various kinds of machine, system, factory etc, however in this discussion a methodology will be presented which (a) is capable of emulating cybernetics at multiple levels in a unified and consistent manner, and (b) can reasonably be learned at an undergraduate engineering/applied maths level. The example chosen here is that of temperature control of the rooms in a house. Lets call this level TDE1. The next level (TDE2) is the one that describes the temperature control of the whole house, while the uppermost level (TDE3) describes the temperature control of all the houses in a city. The reason to choose these three levels has to do with the goal-determining agents at each level. For each room in a building, the occupant/tenant (level 1 agent) uses the thermostat on the wall to (tactically) set the temperature that is most comfortable. The owner of the building (level 2 agent) must pay for all of the heating and cooling for all the room occupants. The owner cannot set the temperature of the individual rooms in a tactical, minute to minute manner, but can set the climate control policy (ie write the 'script') for the building by programming the on and off times for running the boiler and chiller to take advantage of off-peak power grid discounting. At level 3, the agent is the municipal government, who collect taxes, and must stick to a yearly energy supply budget and 5 yearly capital works plan.
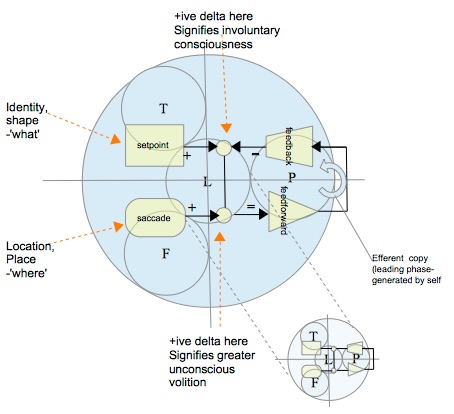
3.11.3 While the three levels of the TDE for the human being are structured differently than for the rooms and buildings in a municipality, it is exactly the same TDE which is used. This is because the design of the TDE is based upon the very general truths of GOLEM theory. The GOLEM has an input channel and output channel which both pass through the P-lobe of the TDE. This arrangement echoes the role of the real parietal lobe, which is a data fusion map (ie represents different types of input like hearing, touch, proprioception in a common format), but also seems to perform some of the output functions normally expected of the frontal lobe. When representations (input maps) exhibit functional overlap with reproductions (output maps) the system involved is usually a servomechanism, in which the datum (a representation) acts as the dynamic attractor of the system state vector.
3.11.4 Searle, Quine and Wittgenstein remind us that making sense of the world can’t be based just on the actual empiric or 'foreground' data, but rather that we need 'background' concepts that in turn are embedded in the functional and the creational aspects of the system under discussion. In the TDE, and in the generic homeostat (both shown in figure 14) the 'measures' (eg the room temperature in the thermostat example) represent the 'foreground' or 'syntactic' aspects, while the datum/setpoint and iterator/offset represent the 'background' or 'semantic' aspects. The terms 'syntactic' and 'semantic' have been used deliberately, as an exemplary means of introducing the very real, intimate link between language and cybernetics. The most common state machine used in cognitive cybernetics is of course, the Turing Machine (TM). Unfortunately, the TM is not as useful an explanatory vehicle as the TDE, because (a) the syntax and semantics of the TM are not clearly separated as they are in the TDE, and (b) the TDE has a shape that resembles (homologous) the gross neuroanatomy of the primate CNS.
3.11.5 The left diagram in figure 14 is equivalent to a TOTE, an acronym for or Test-Operate-Test-Exit [4]. This is programmed by a simple while-do loop. This program structure can be enhanced by using (n+1) instead of n as the loop control (iterator) variable. This has the effect of converting the standard while-do loop (a cybernetic error corrector) into a predictor-corrector. This fairly standard control circuit does the same thing, metaphorically speaking, that the trained marksman does when shooting a moving target- they aim the gun at the point where both bullet and target will be after T seconds, where T is the flight time of the bullet. The enhanced homeostat depicted in the left diagram of figure 14 is (nominally) a continuously valued or 'analog' device. The way it is drawn will be immediately familiar to the electrical/electronic engineer as a schematic of a power amplifier, with amplification and feedback constants Ka and Kf. However, the way that the diagram is used in this text is more general than this narrow, specialist engineering context. This 'amplifier' diagram can be modified to function in a discrete, or discontinuous manner (discrete is the 'opposite' or complementary 'dual' of analog). The term 'TOTE' implies discrete variables and functionality. In practice, all computers are discrete, since analog data flows are inevitably 'sampled' at some finite frequency, and therefore discrete mathematics must be used to process the raw input data.
3.11.6 The idea of thresholding is one of the most important concepts, and is critical to understanding how GOLEM/TDE works, and (especially) its unique computational abilities. When we speak of mathematical variables and values, analog or discrete, we envisage them as points in Euclidean space of some specified (usually 3) dimensions. Yet when we use variables in formulae to compute real-world tasks, usually one or other types of decision support, we don't use the exact values to make that judgement or decision, we use inequalities (thresholding). We decide in the affirmative (or negative) if the computed capability is greater than (or less than) the measured contingency by a suitable margin of error or uncertainty. Within the computer, as well as the brain/mind, the situation is exactly the same. Consider the case of a behavioural stimulus S which only appears when the sensor signal exceeds a threshold T. A simple, one level system with n independent unary sensors has n!/(n-1)! degrees of freedom. However, consider a system in which the sensors are linked, and interdependent. Take the case of a limb which can rotate about a joint. When the limb angle is >5 degrees, sensor #1 'fires' with stimulus S1='true'. When the limb angle is >10 degrees, stimulus S2 = 'true' as well as S1. Imagine that this situation applies for s1, s2, s3, s4 and s5. This system has 5 finite thresholded states, which are equivalent to (but NOT identical with) the discrete limb angle values. In fact, the states form the semantics, while the angle values form the syntax of this simple system, as can be seen from the right hand diagram in figure 14.
3.12 Another advantage of threshold logic is that it allows for a one layer neural network implementation of the XOR function. The systems 


ANF is sometimes described in an equivalent way:









Part 4 -Lexical Analyser/ Parser => compiler design principles
3.13.1 Language is a bio-computer 'program', that is, a nested list of conditional instructions (eg IF X THEN Y ELSE Z) which are either (a) procedural/ robotic- motion/action body-in-world strategies or (b) declarative/ epistemological - semantic/factual database state management scripts.
3.13.2 Every sentence follows the structural design called 'conditional logic', typically expressions that look like those in the following example, text from a automobile spray paint workshop instruction manual - Perhaps X is Y if A, where X = 'spraying them last' Y='suitable', A='the vehicle is going to be sanded and flow-costed' A='B is going to be C and D' where c='sanded' and D='flow costed'
3.13.3 Each of the statements is of the form . They describe the changes to be made to the episodic (left hemisphere/LCH) and semantic (right hemisphere/RCH) knowledge bases at the top level of the brain. Note- these locations are uncontroversial, having been found by Endel Tulving. They were the starting point for the discovery of the TDE-R, and ultimately, GOLEM theory itself. The field describes the label of the node, while the field describes the facts that must be added or taken away.
3.13.4 When each sentence has a single subject, the form and function of the sentence are relatively easy to determine. However, where multiple subjects are presented, several possibilities for level 2 structure exist. GOLEM theory depends on these multiple drafts. These semantic equivalents must be simultaneously reconciled within working memory so that a more robust, and higher dimensional projection of the situation is created, forming what amounts to our ultimate consciousness of it . Imagine committing several 2D views of a building to memory. At some point, the mind's natural propensity to induction (inference, or logical convolution of multiple lower-level data sources) will construct in working memory a higher dimensional 'image' of that building, one that will resemble its 3D realacrum. Figure 20 and paragraphs 1.23.2-1.23.4 indicates how multiple semantic formulae (ie dyads) act like multiple lower (eg 2D) views, thereby causing the mind to materialise within its imagination the higher dimensional (eg 3D) reality. Note that this occurs between all fractal levels, not just between level 2 and level 3. In fact, this can be generalised into one of GOLEM's fundamental mechanisms,namely 'class formation via induction over sets of exemplars'. In other words, there are no labelled classes at all- instead, any one of the elements in the semantic equivalence set (SES) can and does stand for the whole set. This is expressed logically as A*= (a + b+ c+...) where the '+' sign indicates logical 'OR', alternative or parallel equivalent choices. Each time one of the newly learned exemplars (lower case variable names) a, b, c..etc are memorised at a node in the knowledge hierarchy where other exemplars already exist, then that new exemplar adds to the SES. A familiar example of this process is when new synonymic forms for existing words/phrases/sentences are learned . For example, in the Spray Painting guide book extract, the actual VP used 'is going to be' can be replaced by its semantic equivalent 'will be' with little or no loss of exact meaning. Each group of synonyms forms a higher dimensional projected object, enabling the surface form of English, with its chronic avoidance of repetition, to be transcended, revealing a more uniformly familiar semantic 'footprint'. Exemplar-based semantic architecture 'setwork' (network of fractal sets)
3.13.5 As seen in the John-Mary-raincoat example, multiple possible subjects yield multiple potential viewpoints. Just as the cybernetically managed quantity at GOLEM level 2 is 'motive' (represented by terminal situation images), the cybernetically managed quantity at level 3 is 'viewpoint'. This can be seen by the fact that each self's viewpoint is indeed formed from a set of their motives, and each motive is formed from a exemplar set of terminal postures, where postures are local situation images (and of course, SI's are global postures).
3.14.1 One undecided topic in functional neuroanatomy is cerebellar function which, incredibly, has recently been described as a 'tantalizing mystery'[21]. In a 2003 Scientific American article, the following curious fact was noted- that brain trauma patients go on to partially recover from total removal of the cerebellum. In contrast, much more drastic consequences result from partial removal of the cerebrum. TDE/Golem theory (TGT) contains a theory of cerebellar function which provides the explanation that the global P-lobe unit or CBG (Cerebellum and Basal Ganglia) is responsible for the timing of behaviours and gestures. That is, without its influence, the other three TDE-R elements (LCH, RCH, LPC) can 'muddle along' by relying on emergent (component process dependent) timings. Indeed, this explanation is consistent with the existing 'fine/fast motor coordination' function. However, the authors of this article suggest an alternative function which also explains the surprisingly high degree of patient recovery from total cerebellum removal. This alternative theory suggests that the cerebellum is a coordinator of sensory input rather than motor output. TGT has an explanation for the logical reconciliation of such two disparate theories- Action-Percept Common Coding (APCC). This is really a 19th Century idea (ideomotor theory) dressed in 21st Century clothes. The underlying mechanism is the cybernetic servo principle (CSP).
References
1. - my self-assessment of my own success, and whether or not I exceeded prior expectations are a (not very interesting) topic for another day, perhaps for a footnote in my obituary.
2. When you see the word 'tree' think 'hierarchy', and vice versa, unless of course the reference is to something other than a data structure (eg a real tree). While we are on the topic, 'trierarchy' means three-level hierarchy, NOT a parent node with three child nodes., or triple-fork. By the same token, tetrarchy means four level hierarchy. FYI, the Marr-Poggio trierarchy started life as a tetrarchy.
3. Fortunately, since all behaviour is linguistic (see Skinner 1959), in spite of Chomsky's famous refutation, this part of the final package need only be coded once. Language use includes non-verbal behaviour as a subset. Chomsky demonstrated that Skinner was wrong about some things, but Skinner was right about the important things- stimulus and response, deterministic associative learning by passive observation ('classical conditioning') and by actively influencing those observations ('operant learning')
4. Galanter, E., Miller, G., Pribram, K. (1960). Plans and the structure of Behaviour.
5. 'datum' is latin for 'given', a thing given; the expected thing - neuter past participle of 'dare': to give. The latin plural form 'data' means 'more than one datums'. The meaning of the word is in direct opposition to 'information', which means the 'news' or 'unexpected part' of the system output/channel contents. 'Data' vs 'information' thus represents a 'dual' or complementary semantic pairing, 'data' representing the expected part of the signal, and 'information' representing the unexpected part of the signal/channel contents.
6. The difference between Propositional (zeroth order) and Predicate (first order) logic is a tricky one to 'get your head around', no matter how easy some people make it look. However, any time spent understanding this topic is a worthy investment. As well as these two basic forms, typically associated with 'standard' treatments of logic, there are so-called 'modal' (spelled with an 'a', NOT model with an 'e') logics. These are symbolic relational systems which have the same (very useful) set of 'backbone' principles and operations as standard logic (such as de Morgans law), but have in addition to these familiar elements, new operations (and operator symbols, of course) which represent extensions of functionality and expressiveness. The new operators usually (but not always) appear in 'dual' or complementary pairs, such as the modal relations of 'necessity' and 'possibility'.
7. 'arbitrage' is defined here somewhat abstractly as profiting or otherwise benefiting from temporary differences or differentials in value, customarily but not necessarily financial or monetary in nature. 'Buy low, sell high' is a less technical way of describing the essence of this activity. I was inspired by reading this murder mystery cum computer hackers simoire - Chester, A., Barthel, U. (2015) Death by Arbitrage or live low die high. Outskirts Press.
8. Dick, S.J. (2006) The Postbiological Universe. Proc. 57th International Astronautical Congress
9. I prefer the word 'neuroadaptation' to the more loaded 'neural plasticity'. The latter unthinkingly connotes SYNAPTIC plasticity in the mind of the reader, and this is something that I wish to avoid at all costs because (a) it is rubbish, a wrong theory- memory storage is NOT primarily due to synaptic modification (b) I would much prefer that no unthinking activities occur while this document is read, though this is rather unlikely.
10. Dyer, M.C. (2012) Tricyclic Differential Engine-Recursive (TDE-R)- A bioplausible Turing Machine B.Sc Honours Thesis, Flinders University of South Australia.
11. Wikipedia: Exclusive-Or function
12. Wikipedia: Algebraic Normal Form
13. Wetmore, D.Z. Jirenhed, D.A. Rasmussen, A. Johansson, F. Schnitzer, M.J. and Hesslow, G. (2014) Bidirectional Plasticity of Purkinje Cells Matches Temporal Features of Learning. The Journal of Neuroscience, 34(5):1731–1737
14. Vanderwel, R., Sebanz, N. & Knoblich, G. Donders (2007) Action perception from a common coding perspective. Institute for Brain, Cognition & Behaviour, Nijmegen, Nederlands
15. Gamez, D.
16. Chalmers, D.J. (2000) What is a Neural Correlate of Consciousness? Teaching Materials, Philosophy Program, Research School of Social Sciences, Australian National University, A.C.T. 0200
17. The two modes of association learning are passive observation (a.k.a. classical conditioning) and active experimentation (a.k.a. operant learning).
18. Pease, A. (1977) Body Language
19. McCulloch, W. S. & Pitts, W. (1943) A logical calculus of ideas immanent in nervous activity
20. Wikipedia: Hybrid automaton
21. Bower, J.M., Parsons, L.M. (2003) Rethinking the "Lesser Brain". Scientific American 2003
Copyright (2016)- do not copy without attribution- Charles Dyer BE(Mech) BSc(Hons)